Products and Services
VMS
Artificial Intelligence
TIYCam
Vision Display
LATEST NEWS
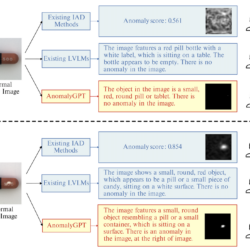
AnomalyGPT:Detecting Industrial Anomalies using LargeVision-Language Models
Large Vision-Language Models (LVLMs) such as MiniGPT-4 and LLaVA have demonstrated the capability of understanding images and achieved remarkable performance in various visual tasks. Despite their strong abilities in recognizing common objects due to extensive training datasets, they lack specific domain knowledge and have a weaker understanding of localized details within objects, which hinders their[…]

Fine-tune Llama 2 in Google Colab
This colab shows how to fine tune llama2 using a single T4 GPU with 15GB VRAM using LoRa. The colab can be found at here. A peak at the instruction fine tuning database:
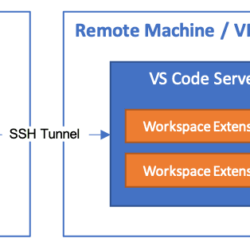
Visual Studio Remote Development using SSH
The Visual Studio Code Remote – SSH extension allows you to open a remote folder on any remote machine, virtual machine, or container with a running SSH server and take full advantage of VS Code’s feature set. Once connected to a server, you can interact with files and folders anywhere on the remote filesystem. No source code[…]
Visual Instruction Tuning: LLaVA: Large Language and Vision AssistantVisual Instruction Tuning
LLaVA represents a novel end-to-end trained large multimodal model that combines a vision encoder and Vicuna for general-purpose visual and language understanding, achieving impressive chat capabilities mimicking spirits of the multimodal GPT-4 and setting a new state-of-the-art accuracy on Science QA. The project can be found here.
GGML model format for Large Language Model
ggml is a library that provides operations for running machine learning models. ggml model format has different versions. By 8/20/2023, there are ggjit v1, ggjt v2 and ggit v3. llama.cpp is a project that uses ggml to run LLaMA, a large language model (like GPT) by Meta. whisper.cpp is a project that uses ggml to[…]
OpenThaiGPT
🇹🇭 OpenThaiGPT 1.0.0-alpha OpenThaiGPT Version 1.0.0-alpha is the first Thai implementation of a 7B-parameter LLaMA v2 Chat model finetuned to follow Thai translated instructions below and makes use of the Huggingface LLaMA implementation. The official website can be found at: https://openthaigpt.aieat.or.th
Pack the Application
The information of the application package for TIYcam can be found in file system. In this article, we show how to use opkg tool to manage the application package. Package Management Tool Frequently used tools: Check installed packages: $opkg list-installed Check the information of the installed package: $ opkg info packagename Install or update the[…]
JES Shared Buffer Mechanism
The shared buffer of JES software is implemented by ‘jbuffer’. ‘jbuffer’ defines two roles: data producer and data consumer. Data producer creates a ring buffer, and publicizes the name of this ring buffer. ‘jbuffer’ manages the ring buffer like a queue. Data producer appends the generated data to the end of the queue, and doesn’t[…]
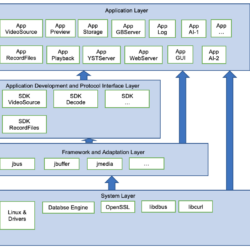
JES Software Bus
JES software bus is the highway of the JES software system. All inter-process communications are managed and handled by the bus. The JES bus is implemented by ‘jbus’. ‘jbus’ defines four roles: publisher, subscriber, requester and replier. ‘jbus’ addresses the communication problems of different processes that run on the same TIYcam. In a good design[…]
File System of JES system for TIYCam
JES uses linux file system OverlayFS. The main file system of JES is squash (read only). The extension file system (rewritable) can be jffs2, ubi, ext4 depending on the storage medium. The two file systems stack together and make a rewritable file system in logic. System Partition The system at least includes the following partitions:[…]
About US
LinkSprite focus on device to cloud total solution for AI+IOT cloud system. It mainly focus on the device hardware, mobile APP and cloud platform to connect sensors, security cameras etc to provide services for home security, home automation, and retail business.
Edge Computing
Leveraging our hardware products and embedded AI algorithms
Cloud Platform
Run AI algorithms on Cloud
Mobile APPS
Android/iOS Apps development
Turn Key Solution and Service
Solution for Home Security and Business Intelligence